
09.11.2008
Das Basisboard BTM-S8IO8S-
Bluetooth l?sst sich wie bisher auch mit einem RS232-TTL-Wandler oder
USB./.TTL-Adapter am Rechner anschlie?en, dar?ber hinaus ist es jetzt
auch m?glich via Bluetooth und einem Akku den Basisboard BTM-S8IO8S
komplett kabellos anzusteuern.



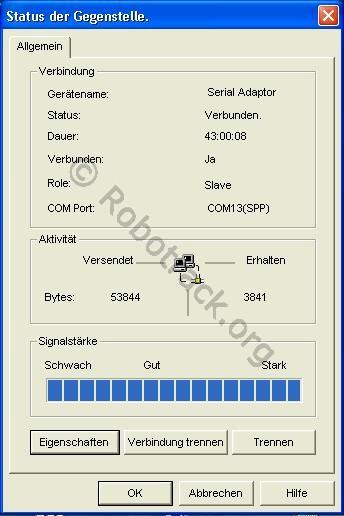
Die Bluetooth-Verbindung vom PC zum BTM-Modul ist eine einfache virtuelle serielle Schnittstelle (COM-Port).
Um das BTM-S8IO8 Basisboard via Bluetooth anzusprechen ben?tigt man entweder einen Bluetooth USB-Dongle oder ein zweites Modul was dann im Master- Mode zu betreiben ist.
Um die Platine m?glichst klein zu halten sind mehr oder weniger alle Bauteile in SMD aufgef?hrt:
Board Leiterplatte 40x63mm
Bluetooth Anschluss ?ber ein BTM-222 Modul (auf Board)
Spannungsversorgung der Servos extern 4,8V-6V oder ?ber den Spannungsregler 7-12V
8 Servo (oder I/O-Anschl?sse)
8 I/O-Anschl?sse
3 Status LEDs
Will man kein Bluetooth verwenden, so ist zus?tzlich ein Stecker vorgesehen ?ber den sich die seriellen Signale (TTL) abgreifen lassen.
An dieser Stiftleiste lassen sich die seriellen Signale abgreifen, und um das Bluetooth Modul vom AVR zu trennen, dies ist notwendig um die Parameter des BTM-222 zu editieren, zu diesem Zweck muss eine serielle Verbindung zum PC mit einem RS232-TTL-Wandler oder USB./.TTL-Adapter hergestellt werden.
 Im Bluetooth-Betrieb des Basisboard
BTM-S8IO8S, m?ssen die beiden Datenleitungen
Im Bluetooth-Betrieb des Basisboard
BTM-S8IO8S, m?ssen die beiden Datenleitungen
RxD -> TxD; TxD -> RxD; gebr?ckt (verbunden) werden.
Dar?ber hinaus ist es auch m?glich, nur das Bluetooth Modul f?r eine andere Hardware einzusetzen, dazu wird einfach das serielle Signal (RxD; TxD; GND) an der Stiftleiste angeschlossen. Umgekehrt l?sst sich auch der AVR (ATMega88) ohne Bluetooth Modul ?ber einen RS232-TTL-Wandler oder USB./.TTL-Adapter via Kabel am PC betreiben.
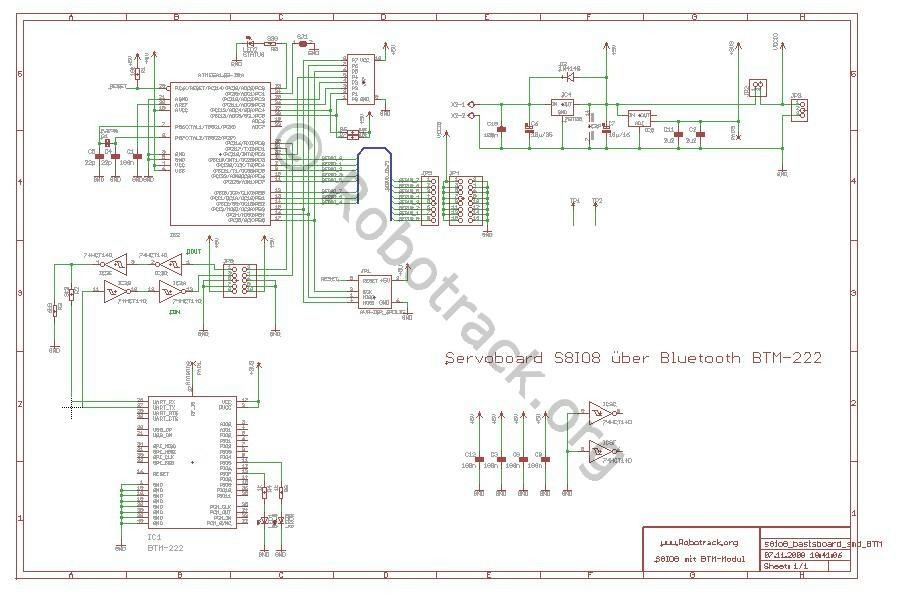
Download: Eagle Layout
Das BTM-Modul l?st sich via AT-Befehle in einem Terminalprogramm konfigurieren, dazu ist es notwendig mit einem Pegelwandler das Modul am PC Anzuschlie?en.
Zum
konfigurieren
muss das BTM-Modul via USB- oder RS232-TTL-Wandler 1-mal an den Rechner
angeschlossen werden, ?ber Funk geht das nicht! Die Baud Rate ist bei
einem jungfr?ulichen BTM222 Modul vom Hersteller auf 19200 Baud und
SLAVE voreingestellt (Defaultzustand).
Bei der Eingabe: AT quittiert er mit OK,
OK
#####
und bei ATI0 mit:
F/W VERSION: v4.22
#####
bei ATI1 mit:
Der Befehl: "ATZ0", stellt den Defaultzustand des BTM-222 Modul wieder her.
Den kompletten Befehlssatz findet man im
Datenblatt
Terminalprogramm- Docklight:
Ist genau das, was man f?r eine Entwicklung ben?tigt, wenn man mit Ger?ten, die sich au?erhalb des PCs befinden Kontakt aufnehmen m?chte, um erste Tests eigens erstellter Protokolle zu machen. Hier ist es m?glich einzelnen Zeichenfolgen, die man absenden m?chte Namen zu geben. Auch kann man auf bestimmte Sequenzen reagieren und das Ganze so automatisieren, dass das Terminalprogramm eine vorprogrammierte Antwort sendet.
www.docklight.de/index_de.htm
Pegelwandler USB-TTL- Nokia-Handyadapter-Kabel..!
geeignete Datenkabel: USB Nokia 7650, 6030, 1100, 1101, 1110, 2600 und 2650
mehr...>>>
Servoserver f?r S8IO /Testversion..!
#############################################################
ToDo Sammelbestellung von double layer Industrieplatinen ist m?glich..!
der wende sich bitte per PN an mich, Trackerhebo
ToDo AVR-Studio-Fuses
Servo und I/O Controller S8IO8 Treiber f?r ATMega88 ? F.Greif
Drehbereich normal: von 0.8 bis 2.2ms
PortD3 Servo-0 0x23 0x53 0x00 0x(Servoposition von 01 bis FF)
PortD4 Servo-1 0x23 0x53 0x01 0x(Servoposition von 01 bis FF)
PortD5 Servo-2 0x23 0x53 0x02 0x(Servoposition von 01 bis FF)
PortD6 Servo-3 0x23 0x53 0x03 0x(Servoposition von 01 bis FF)
PortB2 Servo-4 0x23 0x53 0x04 0x(Servoposition von 01 bis FF)
PortD7 Servo-5 0x23 0x53 0x05 0x(Servoposition von 01 bis FF)
PortB1 Servo-6 0x23 0x53 0x06 0x(Servoposition von 01 bis FF)
PortB0 Servo-7 0x23 0x53 0x07 0x(Servoposition von 01 bis FF)
Drehbereich erweiterter von 0.5 bis 2.5ms
PortD3 Servo-0 0x23 0x4C 0x00 0xB8 0x00 0xF1 0x9A
PortD4 Servo-1 0x23 0x4C 0x01 0xB8 0x00 0xF1 0x9A
PortD5 Servo-2 0x23 0x4C 0x02 0xB8 0x00 0xF1 0x9A
PortD6 Servo-3 0x23 0x4C 0x03 0xB8 0x00 0xF1 0x9A
PortB2 Servo-4 0x23 0x4C 0x04 0xB8 0x00 0xF1 0x9A
PortD7 Servo-5 0x23 0x4C 0x05 0xB8 0x00 0xF1 0x9A
PortB1 Servo-6 0x23 0x4C 0x06 0xB8 0x00 0xF1 0x9A
PortB0 Servo-7 0x23 0x4C 0x07 0xB8 0x00 0xF1 0x9A
8 I/O Pins als Ein- und Ausg?nge nutzbar
PortC5 I/O-1 0x23 0x4F 0x01 0x(EIN 01, AUS 00)
PortC4 I/O-2 0x23 0x4F 0x02 0x(EIN 02, AUS 00)
PortC3 I/O-3 0x23 0x4F 0x04 0x(EIN 04, AUS 00)
PortC2 I/O-4 0x23 0x4F 0x08 0x(EIN 08, AUS 00)
PortD2 I/O-5 0x23 0x4F 0x10 0x(EIN 10, AUS 00)
PortB5 I/O-6 0x23 0x4F 0x20 0x(EIN 20, AUS 00)
PortB4 I/O-7 0x23 0x4F 0x40 0x(EIN 40, AUS 00)
PortB3 I/O-8 0x23 0x4F 0x80 0x(EIN 80, AUS 00)
I/O-Muster 0x23 0x4F 0xFF 0x55
Version 0x23 0x56
Startet de AVR Neu 0x23 0x52
Projekt Legende
Soweit bekannt Urspr?nglich: Copyright ? 2009 RoboTrack
Software Servo-Treiber: ? F.Greif
weiter Entwickelt: von Fennec und Trackerhebo
Weblinks:
Hinweis: Copyright ? 2009 RoboTrack
TODO
Diese Seite wurde zuletzt bearbeitet am: 14 Dezember 2012

Copyright ? 2008/09 www.robotrack.org
Erster von mir aufgebauter Prototyp, 2 November 2008
Erfolgreicher Funktionstest mit der Firmware S8IO8 Der Controller- Treiber S8IO8 ist auf einem ATMega48/88 oder 168 der mit 4.0000, 7.3728, 8.0000 oder 14.7456 MHz getaktet werden kann.Die Bluetooth-Verbindung vom PC zum BTM-Modul ist eine einfache virtuelle serielle Schnittstelle (COM-Port).
Um das BTM-S8IO8 Basisboard via Bluetooth anzusprechen ben?tigt man entweder einen Bluetooth USB-Dongle oder ein zweites Modul was dann im Master- Mode zu betreiben ist.
|
|
|
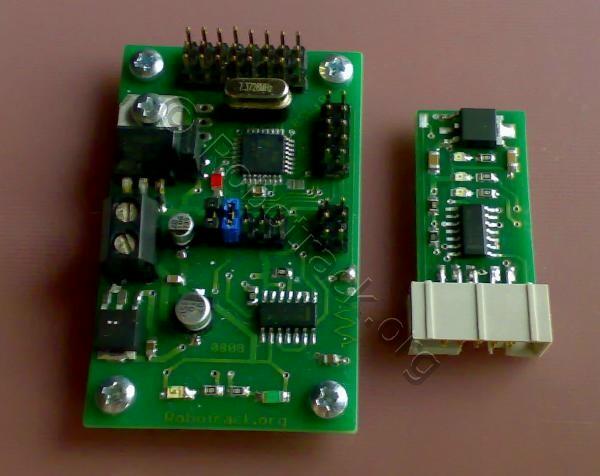
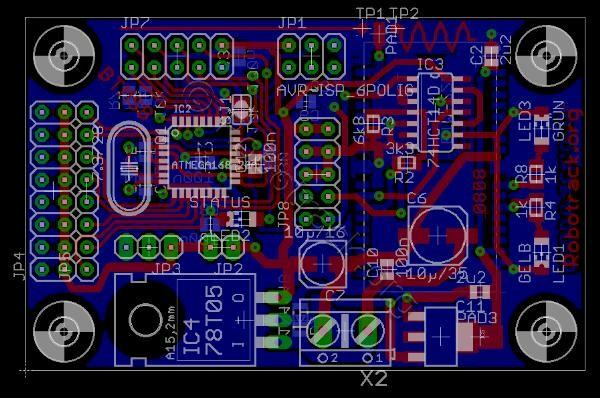
Um die Platine m?glichst klein zu halten sind mehr oder weniger alle Bauteile in SMD aufgef?hrt:
Board Leiterplatte 40x63mm
Bluetooth Anschluss ?ber ein BTM-222 Modul (auf Board)
Spannungsversorgung der Servos extern 4,8V-6V oder ?ber den Spannungsregler 7-12V
8 Servo (oder I/O-Anschl?sse)
8 I/O-Anschl?sse
3 Status LEDs
Will man kein Bluetooth verwenden, so ist zus?tzlich ein Stecker vorgesehen ?ber den sich die seriellen Signale (TTL) abgreifen lassen.
Video: |
Die Bluetooth Funkverbindung ist hervorragend..! |

 |

|
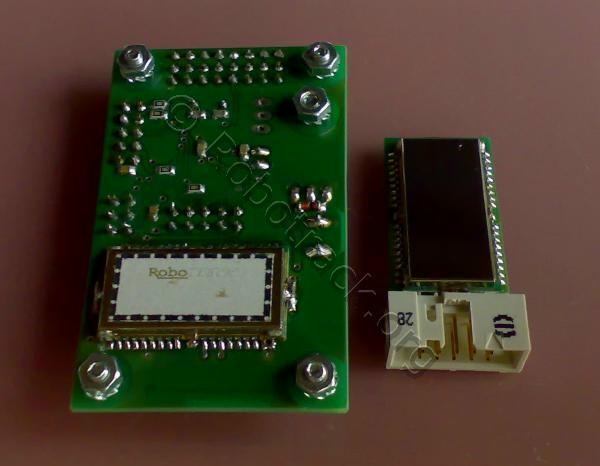
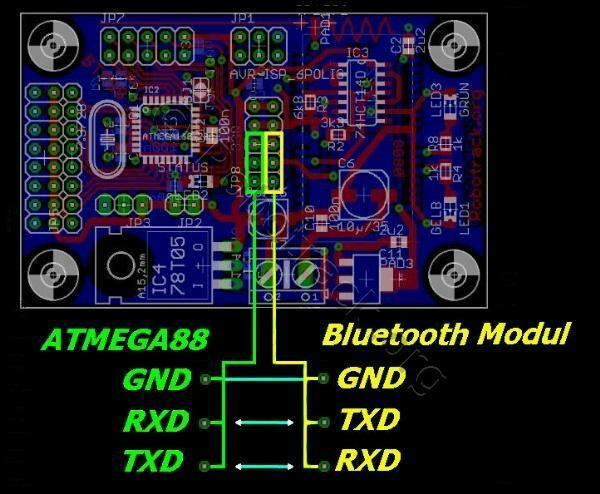
An dieser Stiftleiste lassen sich die seriellen Signale abgreifen, und um das Bluetooth Modul vom AVR zu trennen, dies ist notwendig um die Parameter des BTM-222 zu editieren, zu diesem Zweck muss eine serielle Verbindung zum PC mit einem RS232-TTL-Wandler oder USB./.TTL-Adapter hergestellt werden.
Im Bluetooth-Betrieb des Basisboard
BTM-S8IO8S, m?ssen die beiden Datenleitungen RxD -> TxD; TxD -> RxD; gebr?ckt (verbunden) werden.
Dar?ber hinaus ist es auch m?glich, nur das Bluetooth Modul f?r eine andere Hardware einzusetzen, dazu wird einfach das serielle Signal (RxD; TxD; GND) an der Stiftleiste angeschlossen. Umgekehrt l?sst sich auch der AVR (ATMega88) ohne Bluetooth Modul ?ber einen RS232-TTL-Wandler oder USB./.TTL-Adapter via Kabel am PC betreiben.
|
|
|
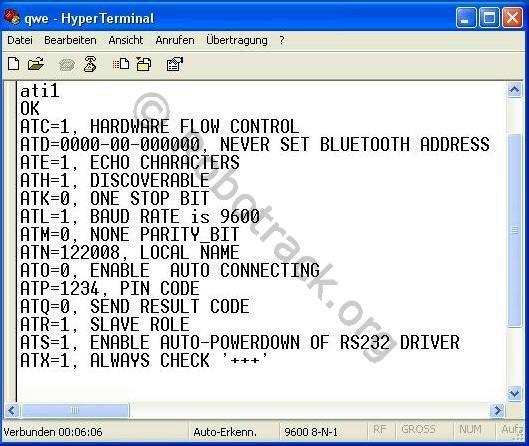
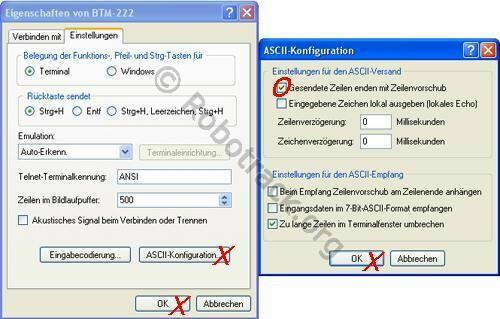
Das BTM-Modul l?st sich via AT-Befehle in einem Terminalprogramm konfigurieren, dazu ist es notwendig mit einem Pegelwandler das Modul am PC Anzuschlie?en.
Zum
konfigurieren
muss das BTM-Modul via USB- oder RS232-TTL-Wandler 1-mal an den Rechner
angeschlossen werden, ?ber Funk geht das nicht! Die Baud Rate ist bei
einem jungfr?ulichen BTM222 Modul vom Hersteller auf 19200 Baud und
SLAVE voreingestellt (Defaultzustand). Im Hyperterminal sind folgende Einstellungen vorzunehmen:
|
|


Bei der Eingabe: AT quittiert er mit OK,
OK
#####
und bei ATI0 mit:
F/W VERSION: v4.22
#####
bei ATI1 mit:
Der Befehl: "ATZ0", stellt den Defaultzustand des BTM-222 Modul wieder her.
Den kompletten Befehlssatz findet man im
Datenblatt
Terminalprogramm- Docklight:
Ist genau das, was man f?r eine Entwicklung ben?tigt, wenn man mit Ger?ten, die sich au?erhalb des PCs befinden Kontakt aufnehmen m?chte, um erste Tests eigens erstellter Protokolle zu machen. Hier ist es m?glich einzelnen Zeichenfolgen, die man absenden m?chte Namen zu geben. Auch kann man auf bestimmte Sequenzen reagieren und das Ganze so automatisieren, dass das Terminalprogramm eine vorprogrammierte Antwort sendet.
www.docklight.de/index_de.htm
Pegelwandler USB-TTL- Nokia-Handyadapter-Kabel..!
geeignete Datenkabel: USB Nokia 7650, 6030, 1100, 1101, 1110, 2600 und 2650
mehr...>>>
Servoserver f?r S8IO /Testversion..!
#############################################################
ToDo Sammelbestellung von double layer Industrieplatinen ist m?glich..!
der wende sich bitte per PN an mich, Trackerhebo
ToDo AVR-Studio-Fuses
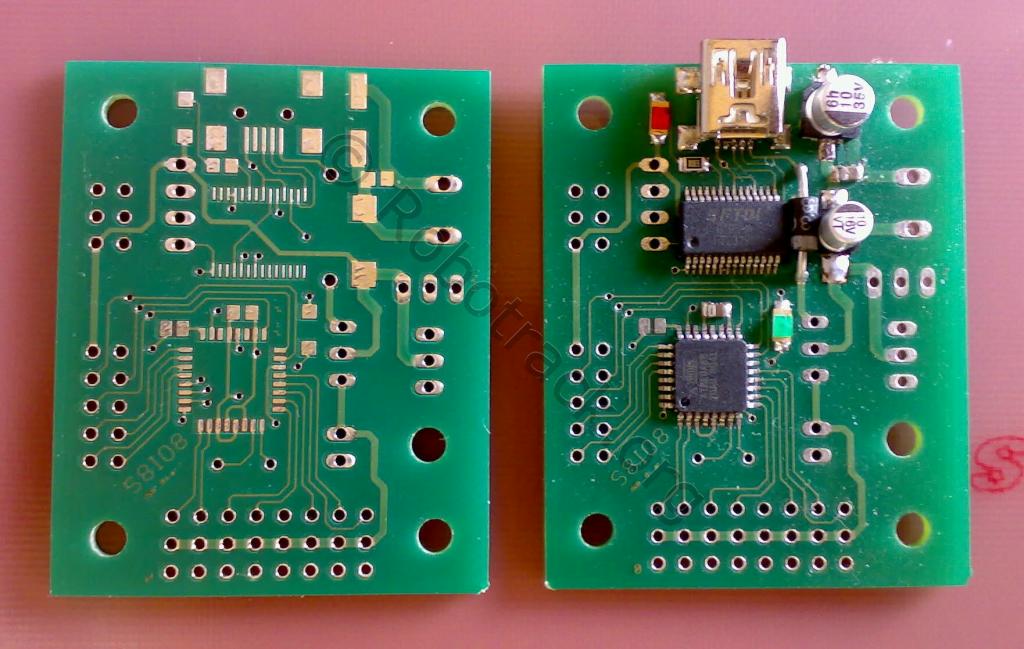
Die Alternative mit USB
|
|
S8IO8 SMD USB auf double layer IndustrieplatineSeptember 2007 auf doppelseitiger Platine, nur 40x50mm in SMD, USB- Serial Port, Anschluss f?r 8 Servos und 8 mal I/O Der Controller- Treiber S8IO8 ist auf einem ATMega48/88 oder 168 der mit 4.0000, 7.3728, 8.0000 oder 14.7456 MHz getaktet werden kann. mehr...>>> |

{kind=link}
Servo und I/O Controller S8IO8 Treiber f?r ATMega88 ? F.Greif
Drehbereich normal: von 0.8 bis 2.2ms
PortD3 Servo-0 0x23 0x53 0x00 0x(Servoposition von 01 bis FF)
PortD4 Servo-1 0x23 0x53 0x01 0x(Servoposition von 01 bis FF)
PortD5 Servo-2 0x23 0x53 0x02 0x(Servoposition von 01 bis FF)
PortD6 Servo-3 0x23 0x53 0x03 0x(Servoposition von 01 bis FF)
PortB2 Servo-4 0x23 0x53 0x04 0x(Servoposition von 01 bis FF)
PortD7 Servo-5 0x23 0x53 0x05 0x(Servoposition von 01 bis FF)
PortB1 Servo-6 0x23 0x53 0x06 0x(Servoposition von 01 bis FF)
PortB0 Servo-7 0x23 0x53 0x07 0x(Servoposition von 01 bis FF)
Drehbereich erweiterter von 0.5 bis 2.5ms
PortD3 Servo-0 0x23 0x4C 0x00 0xB8 0x00 0xF1 0x9A
PortD4 Servo-1 0x23 0x4C 0x01 0xB8 0x00 0xF1 0x9A
PortD5 Servo-2 0x23 0x4C 0x02 0xB8 0x00 0xF1 0x9A
PortD6 Servo-3 0x23 0x4C 0x03 0xB8 0x00 0xF1 0x9A
PortB2 Servo-4 0x23 0x4C 0x04 0xB8 0x00 0xF1 0x9A
PortD7 Servo-5 0x23 0x4C 0x05 0xB8 0x00 0xF1 0x9A
PortB1 Servo-6 0x23 0x4C 0x06 0xB8 0x00 0xF1 0x9A
PortB0 Servo-7 0x23 0x4C 0x07 0xB8 0x00 0xF1 0x9A
8 I/O Pins als Ein- und Ausg?nge nutzbar
PortC5 I/O-1 0x23 0x4F 0x01 0x(EIN 01, AUS 00)
PortC4 I/O-2 0x23 0x4F 0x02 0x(EIN 02, AUS 00)
PortC3 I/O-3 0x23 0x4F 0x04 0x(EIN 04, AUS 00)
PortC2 I/O-4 0x23 0x4F 0x08 0x(EIN 08, AUS 00)
PortD2 I/O-5 0x23 0x4F 0x10 0x(EIN 10, AUS 00)
PortB5 I/O-6 0x23 0x4F 0x20 0x(EIN 20, AUS 00)
PortB4 I/O-7 0x23 0x4F 0x40 0x(EIN 40, AUS 00)
PortB3 I/O-8 0x23 0x4F 0x80 0x(EIN 80, AUS 00)
I/O-Muster 0x23 0x4F 0xFF 0x55
Version 0x23 0x56
Startet de AVR Neu 0x23 0x52
Projekt Legende
Soweit bekannt Urspr?nglich: Copyright ? 2009 RoboTrack
Software Servo-Treiber: ? F.Greif
weiter Entwickelt: von Fennec und Trackerhebo
Weblinks:
Hinweis: Copyright ? 2009 RoboTrack
TODO
Diese Seite wurde zuletzt bearbeitet am: 14 Dezember 2012
Copyright ? 2008/09 www.robotrack.org